
DBSCAN tutorial
Reference
DBSCAN tutorial은 상기 주소를 참조했습니다.
DBSCAN, or Density-Based Spatial Clustering of Applications with Noise, is an unsupervised machine learning algorithm.
Pros
- 입력매개변수(K-cluster 분석의 k값같은)가 사전 도메인지식으로 많이 필요하지 않다.
- 임의모양의 클러스터 검색 ( k-means 와 같이, 군집이 구형 모양을 갖는다고 가정하지 않는다)
- 대용량 데이터베이스에서 뛰어난 효율성 -> 이 부분은 정확히 모르겠다.
- 잡음점을 제거하기 쉽다
Key Concept
- eps : 엡실론이라 불리우며, threshold 역할을 한다. 두 점 사이의 거리가, 이 값보다 작으면, 이웃으로 본다.
- min_sample : core 포인트를 만드는 구성요건으로 eps 내의 점. 즉 이웃의 갯수를 의미한다. 만약 min_sample 이 3일때, eps를 충족하는 점들의 거리가 이 갯수이상이 된다면, 그 포인튼 Core Point!
중요 포인트는 반드시 갯수를 카운트 할때, 본인 스스로 point도 포함해야 한다.!!
- metric : The metric to use when calculating distance between instances in a feature array
core point : 설정한 이웃점(min_sample) 수가 설정한 반지름(epc) 내에 떨어진다면, 그 점은__(자기 자신 포인트 포함)__ core point 이다.
border point : e 내에서, 설정한 이웃 점의 갯수보다 더 작은 수의 이웃을 갖는 점이지만, core poring 로 부터, e 안에 놓이는 점이다.
noise point : core도 border도 아닌 다른 모든 점들은 잡음점이다.
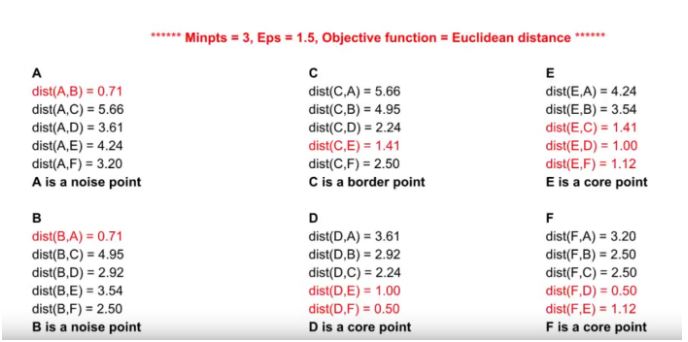
위의 예제는 6개 점이 있다고 할때, 각각의 점을 모두 라벨링하는 과정이다.(eps=1.5,min_sample:3)
A: eps 보다 작은 distance가 2개 밖에 없고, A,B 모두 core point가 아님 -> noise point
B : eps 보다 작은 distance가 2개 밖에 없고, A,B 모두 core point가 아님 -> noise point
C : eps 보다 작은 distance가 2개 밖에 없지만, E가 core point 임. -> border point
D : eps 보다 작은 distance가 3개 있음. 조건충족 -> core point
E : eps 보다 작은 distance가 3개 있음. 조건충족 -> core point
F : eps 보다 작은 distance가 3개 있음. 조건충족 -> core point
import numpy as np
from sklearn.datasets.samples_generator import make_blobs
from sklearn.neighbors import NearestNeighbors
from sklearn.cluster import DBSCAN
from matplotlib import pyplot as plt
import seaborn as sns
sns.set(style='whitegrid')
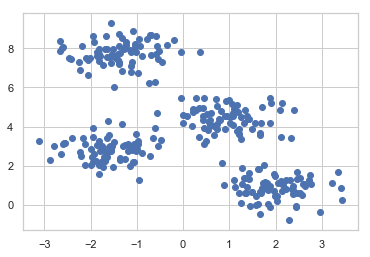
X, y = make_blobs(n_samples=300, centers=4, cluster_std=0.60, random_state=0)
plt.scatter(X[:,0], X[:,1])
<matplotlib.collections.PathCollection at 0x1e8f94eb278>
DBSCAN 알고리즘에서, 사용하는 주요한 parameter 는 eps, min_sample 이다.
이를 찾는 알고리즘은 layman’s terms 에 의하면, 1개의 점에서, 가까운 순으로 distance를 구했을대, 급격히 늘어나는 구간을 찾고 그 값을 활용하는 것이
이상적이란 논거를 활용한다.
[https://iopscience.iop.org/article/10.1088/1755-1315/31/1/012012/pdf]
print(X.shape,y.shape)
(300, 2) (300,)
Small topic : Start
neigh = NearestNeighbors(n_neighbors=4)
nbrs = neigh.fit(X)
distances, indices = nbrs.kneighbors(X)
print(distances.shape,indices.shape,len(distances),len(indices))
(300, 4) (300, 4) 300 300
indices[0:3]
array([[ 0, 4, 124, 118],
[ 1, 89, 146, 48],
[ 2, 186, 159, 107]], dtype=int64)
distances[0:3]
array([[0. , 0.49822928, 0.78213781, 0.83547371],
[0. , 0.08829225, 0.12609655, 0.17241417],
[0. , 0.12019666, 0.21667913, 0.3077693 ]])
## 위의 값이 어떻게 나오는지 궁금하여 조합수가 아닐까 의심했지만...역시 아니었다.
from itertools import combinations
combi = combinations(X,2)
print(len(list(combi)))
44850
small topic : n_neighbors=4 는 본인 포인트를 포함하여, 가까운 이웃 4개에 대한 인덱스를 반환한다.
위처럼 neigh = NearestNeighbors(n_neighbors=4) 이면, 4개씩의 컬럼이 반환된다.
Small topic End
다시 본론으로
neigh = NearestNeighbors(n_neighbors=2)
nbrs = neigh.fit(X)
distances, indices = nbrs.kneighbors(X)
distances[0:10]
array([[0. , 0.49822928],
[0. , 0.08829225],
[0. , 0.12019666],
[0. , 0.11049628],
[0. , 0.31064694],
[0. , 0.61124146],
[0. , 0.35774854],
[0. , 0.01966341],
[0. , 0.29733787],
[0. , 0.03349706]])
상기 값에서, 거리가 짧게 나온 순으로 세운다.
distances_sort = np.sort(distances, axis=0)
distances_sort[0:10]
array([[0. , 0.00647163],
[0. , 0.00647163],
[0. , 0.00975014],
[0. , 0.00975014],
[0. , 0.01234906],
[0. , 0.01234906],
[0. , 0.01264242],
[0. , 0.01264242],
[0. , 0.01430681],
[0. , 0.01430681]])
distances_plot = distances_sort[:,1]
plt.plot(distances_plot)
# ax.set_ylabel(ylabel = "distance")
[<matplotlib.lines.Line2D at 0x1e8f9a77eb8>]
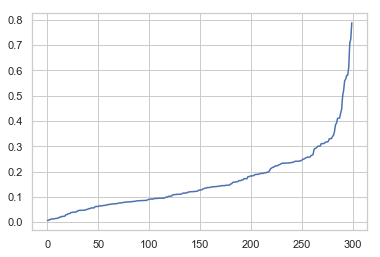
급격히 값이 증가하는 부분을 찾는다. 여기서는 0.3 으로 판단할 수 있다.
m = DBSCAN(eps=0.3, min_samples=5)
m.fit(X)
DBSCAN(eps=0.3)
clusters = m.labels_
print(len(clusters))
clusters
300
array([-1, 0, 1, 0, -1, -1, -1, 1, -1, 4, 2, -1, 1, -1, -1, 1, 1,
3, 2, 8, 3, 3, 1, 2, 2, -1, 3, 1, -1, 1, 7, 0, -1, -1,
0, 0, 0, -1, 2, 3, 1, 2, -1, 1, 2, 2, 0, 2, 0, 3, 2,
3, 0, 3, -1, 2, -1, -1, 0, 3, 0, 1, -1, 2, 2, 2, 0, 3,
-1, 2, 1, -1, 0, 2, 2, 4, 2, 1, 3, 0, -1, 1, 3, 3, 0,
1, 3, 5, -1, 0, 1, 3, -1, 2, 2, 1, 6, 3, -1, -1, 4, -1,
7, 3, 1, 3, -1, 1, -1, 1, 8, -1, 3, -1, 3, -1, 0, 3, 6,
-1, -1, 3, -1, 3, 6, 3, 3, 8, 3, 2, -1, 2, 2, -1, 0, 8,
9, 0, -1, 7, -1, 2, 1, -1, -1, 2, 0, -1, 0, 0, 0, 1, -1,
5, 10, 2, 0, 2, 3, 1, -1, 1, 1, 6, 1, -1, -1, 5, 3, 1,
1, 0, 3, -1, -1, 0, 3, 3, 1, 2, 3, 1, 2, 2, 5, 1, 1,
1, 3, 0, -1, 2, 1, 1, 2, 2, 9, -1, 2, 0, 1, 2, 10, 2,
1, -1, 2, 4, 1, -1, 1, 2, 5, -1, 0, 2, 2, 3, -1, 1, 0,
3, 3, 9, 10, 9, -1, -1, 0, -1, 1, -1, 1, -1, 2, 1, 3, 2,
-1, 2, 3, 5, -1, 0, 0, 0, 0, 2, 2, -1, -1, 2, 3, 1, 2,
-1, -1, 3, 3, 0, 1, 5, -1, 3, -1, 2, 1, 7, -1, 3, 3, 9,
2, -1, -1, 10, 6, -1, 0, 0, 3, 3, -1, 3, 3, -1, 0, -1, 0,
1, -1, 3, 0, -1, 0, -1, 3, 1, -1, 2], dtype=int64)
## 총 12개 그룹으로 나뉜것을 알 수 있다.
set(clusters)
{-1, 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10}
colors = ['royalblue', 'maroon', 'forestgreen', 'mediumorchid', 'tan', 'deeppink', 'olive', 'goldenrod', 'lightcyan', 'navy']
vectorizer = np.vectorize(lambda x: colors[x % len(colors)])
plt.scatter(X[:,0], X[:,1], c=vectorizer(clusters))
<matplotlib.collections.PathCollection at 0x1e8f9ae15c0>
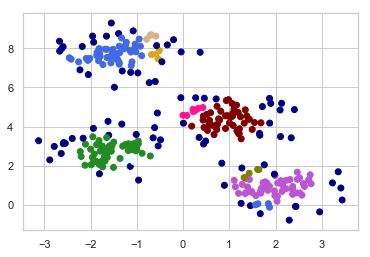
총 8개 그룹으로 뭉쳐진 것을 알 수 있다.
dark blue 포인트들은 noise_point 이다.
만약 좀 더 크게 묶는다면,
m01 = DBSCAN(eps=0.3, min_samples=10)
m01.fit(X)
clusters01 = m01.labels_
colors = ['royalblue', 'maroon', 'forestgreen', 'mediumorchid', 'tan', 'deeppink', 'olive', 'goldenrod', 'lightcyan', 'navy']
vectorizer = np.vectorize(lambda x: colors[x % len(colors)])
len(set(clusters01))
9
plt.scatter(X[:,0], X[:,1], c=vectorizer(clusters01))
<matplotlib.collections.PathCollection at 0x1e8f9b92668>
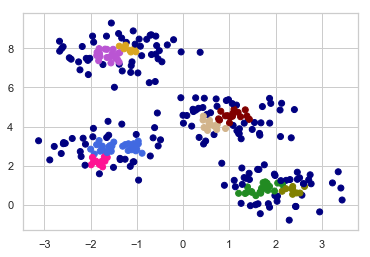
9개 그룹으로 쪼개진 것을 알 수 있다.
다음 posting 에서는 카테고리컬 변수들의 clustering 을 살펴본다.
Comments